







Design With Robots
Design With Robots
Winter Semester 2023 – 2024
This elective by Prof. Andrea Kondziela explores the intersection of computational design and robotic fabrication, introducing students to digital workflows that translate parametric models into robotic actions. Participants will experiment with various robotic techniques, including weaving, stamping in mud, drawing, and more, to investigate material behavior and new modes of architectural expression.
CONTEXT
In today‘s rapidly evolving world, the integration of cutting-edge technology in architecture has become not only essential but also transformative. The ‘Design (with) Robots’ elective module is an immersive exploration of this dynamic intersection between architectural design and robotics. This course is designed to provide students with a first-hand experience, inspiring them to see how robots can be leveraged as powerful tools to enhance and redefine the architectural design process.
GOAL
The course objectives are comprehensive, aiming to introduce students to the field of Architectural Robotics. Its core principles, history, current trends, and future possibilities will be explored, providing a solid foundation of knowledge. Students will also learn how to communicate and program a robotic arm using Rhino and Grasshopper, and how to combine it with computational design techniques, equipping them with the skills to excel in this field.
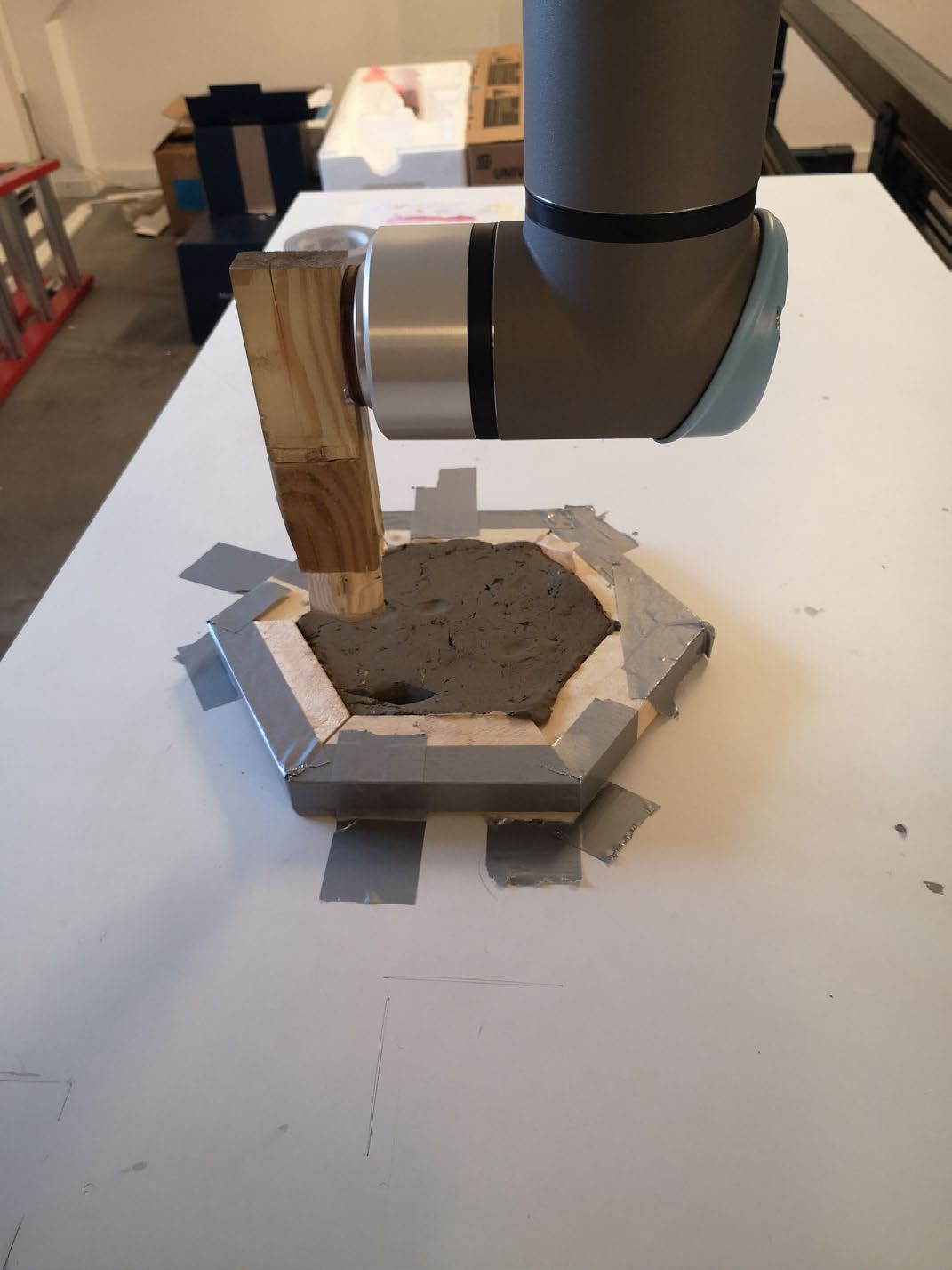
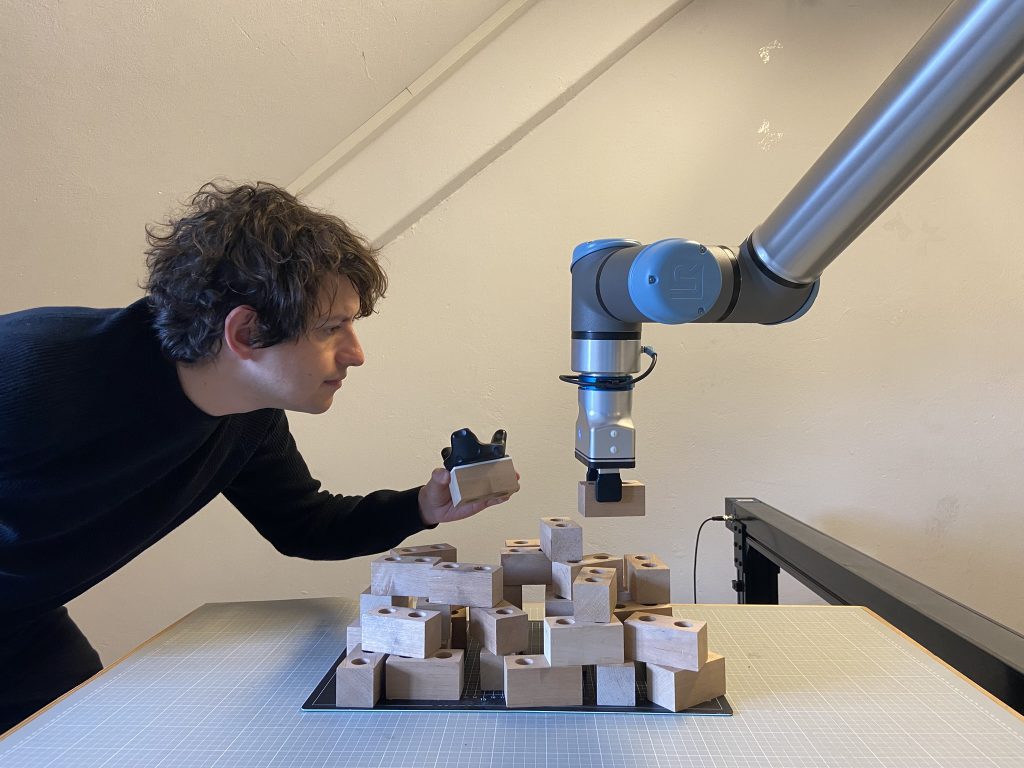
For the practical hands-on experience, the new robotic infrastructure (UR10e robotic arm) by the CAAD Professorship will be used and set up individually for various design processes.
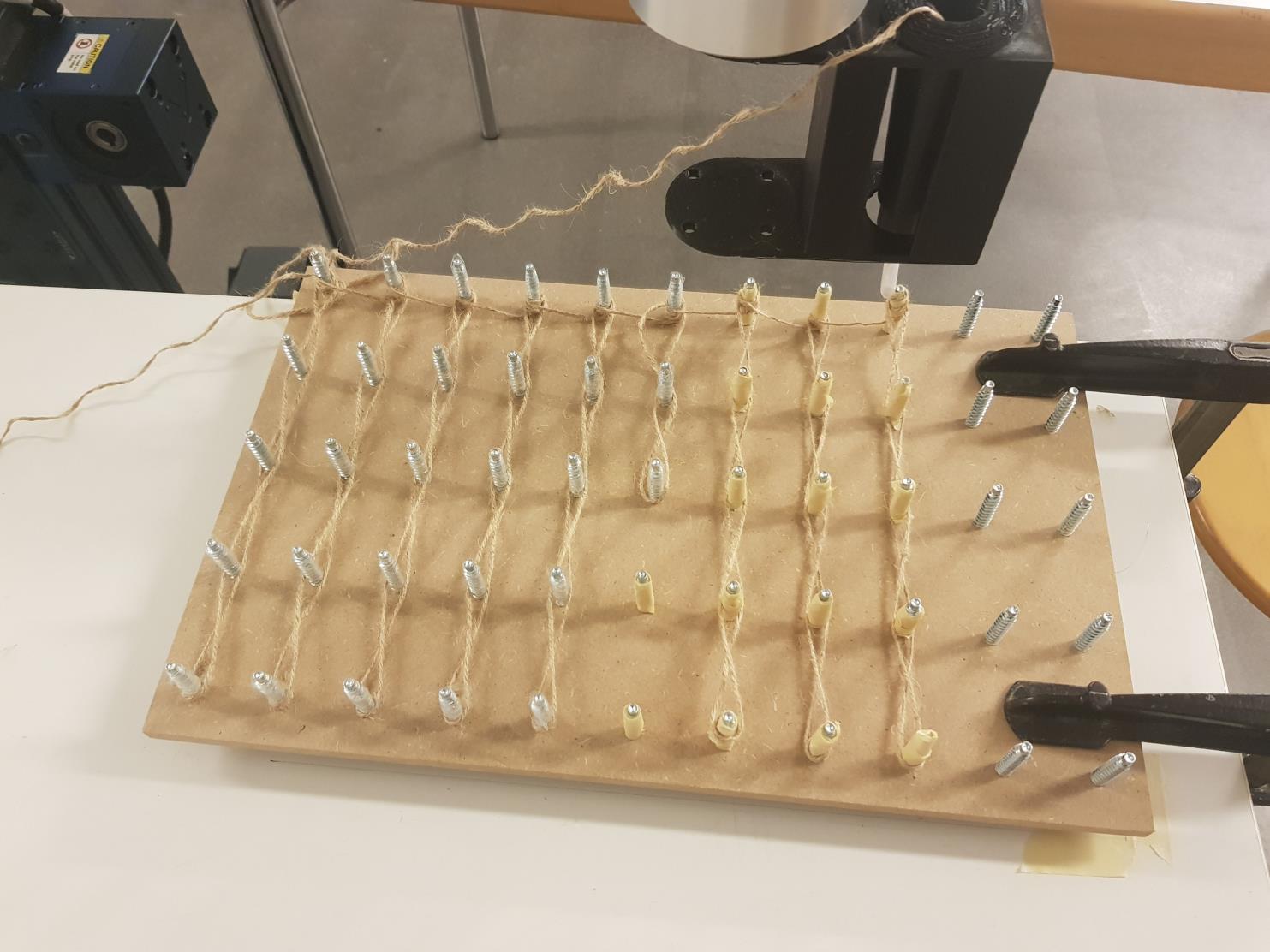
Robotic Weaving
A robotic arm precisely lays down continuous fiber strands, interlacing them in complex geometries. Once the weaving is complete, a curing resin is applied—either pre-impregnated in the fibers (prepreg) or introduced post-weaving through a controlled infusion process. As the resin hardens, it solidifies the form, creating a lightweight yet robust composite structure.
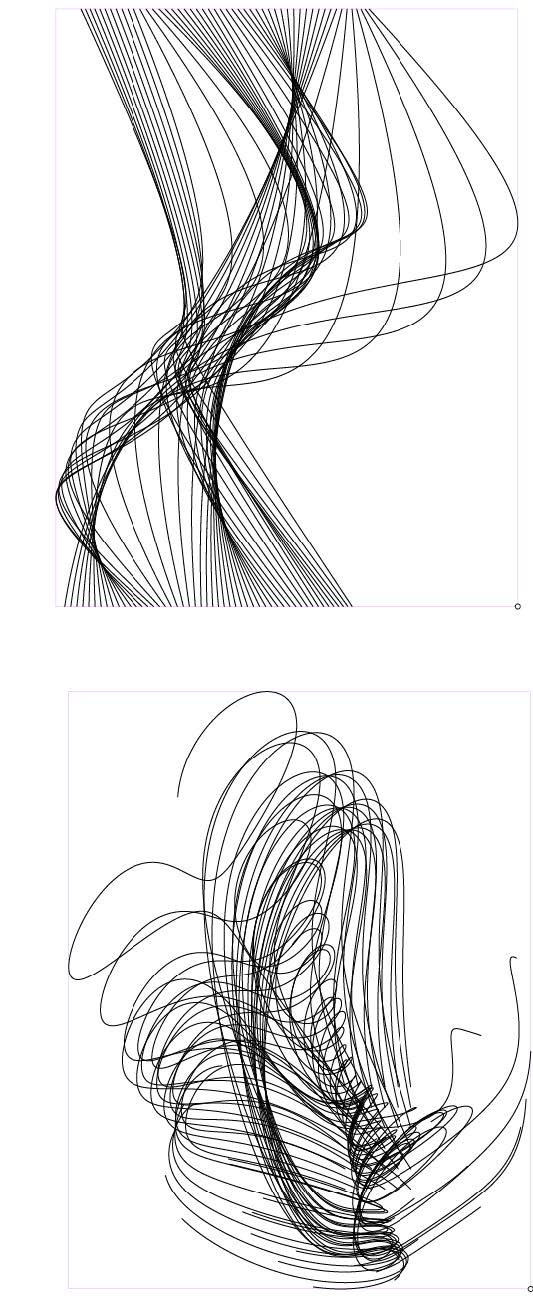
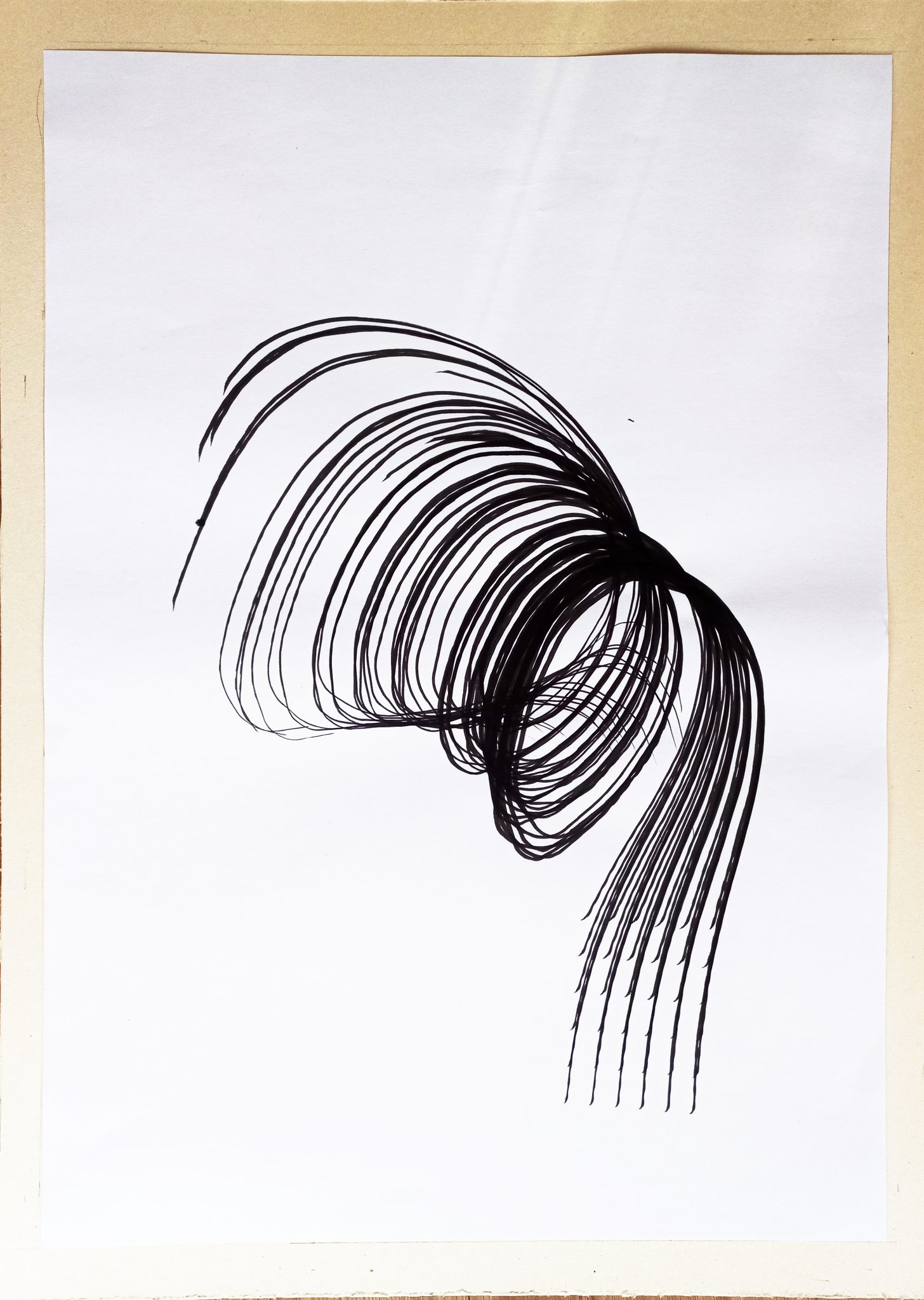
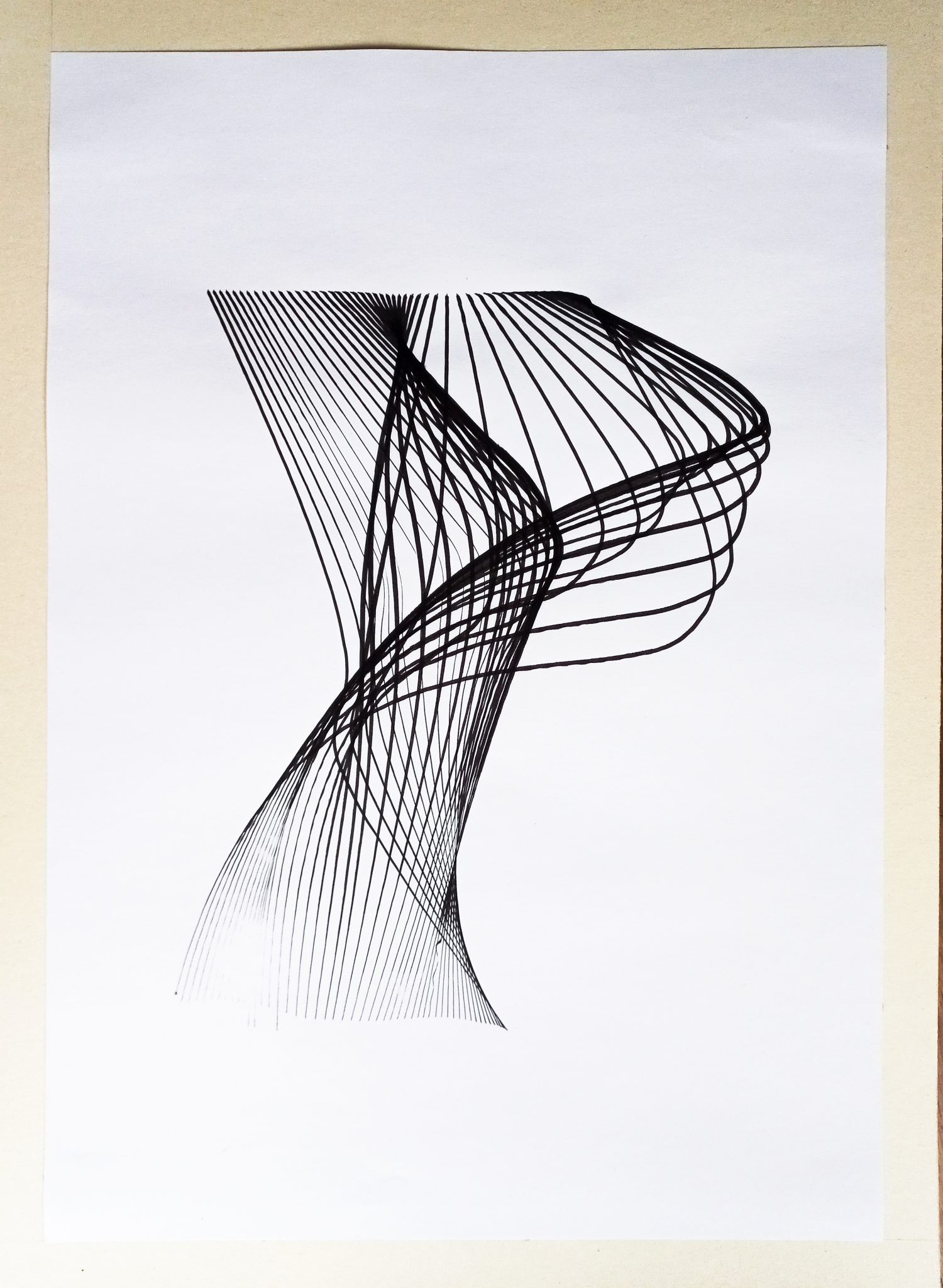
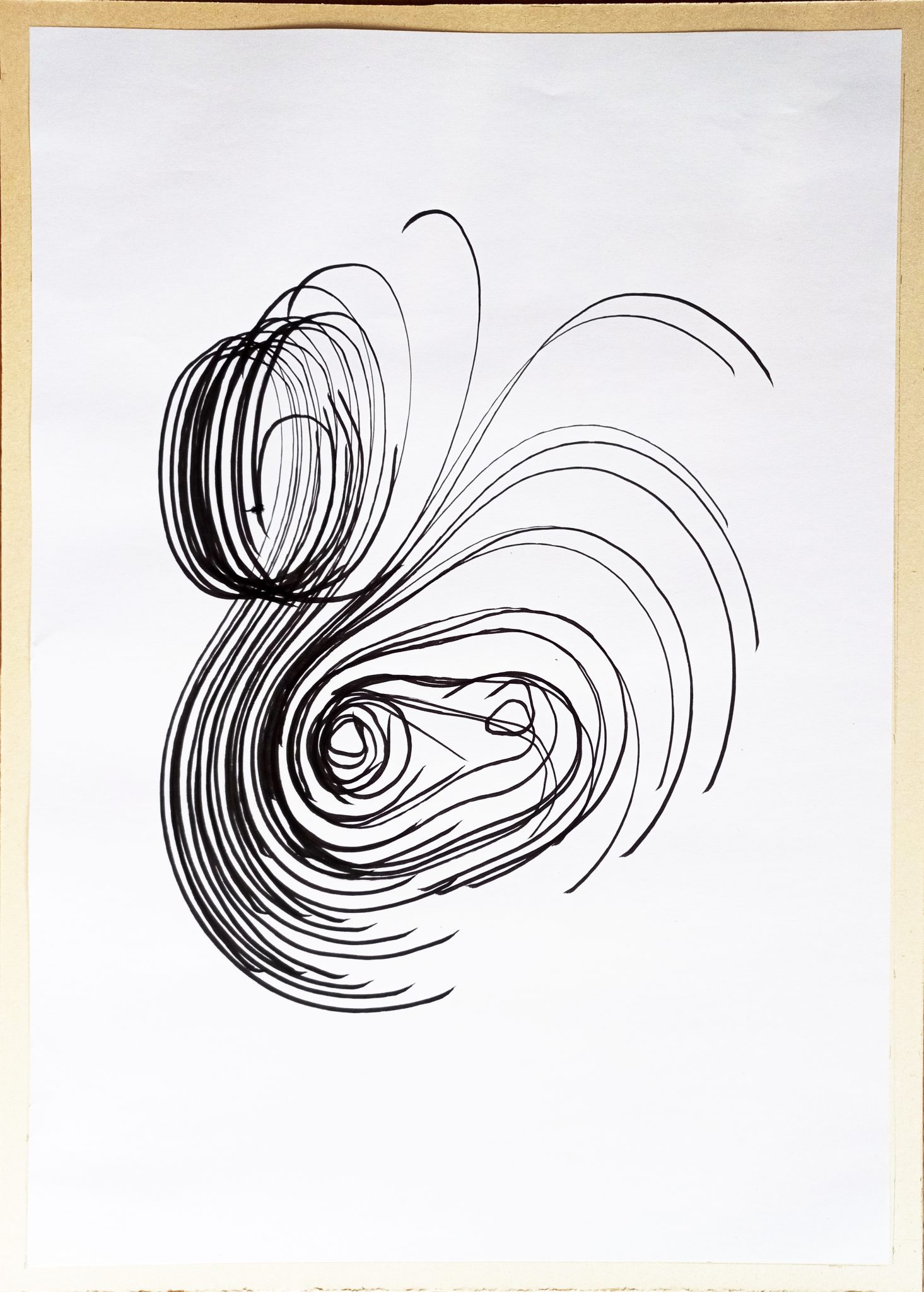
Robotic Drawing
Using computational design tools, students can generate custom toolpaths that guide the robotic arm to draw with pens, brushes, markers, or even unconventional tools like chalk or spray paint. The process enables experimentation with varying pressure, speed, and stroke techniques, mimicking traditional hand-drawn aesthetics while leveraging robotic precision.
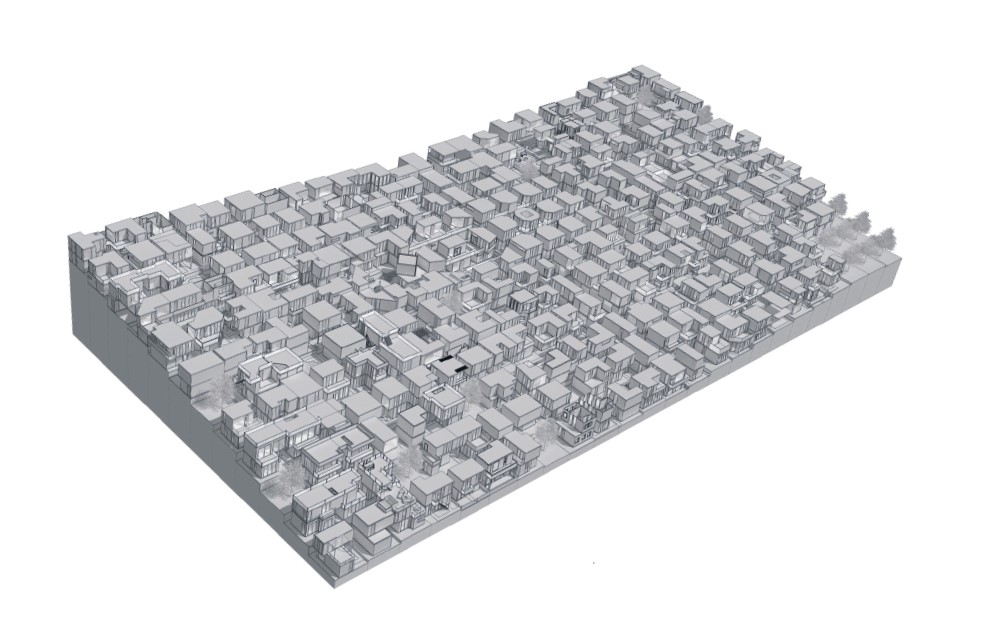
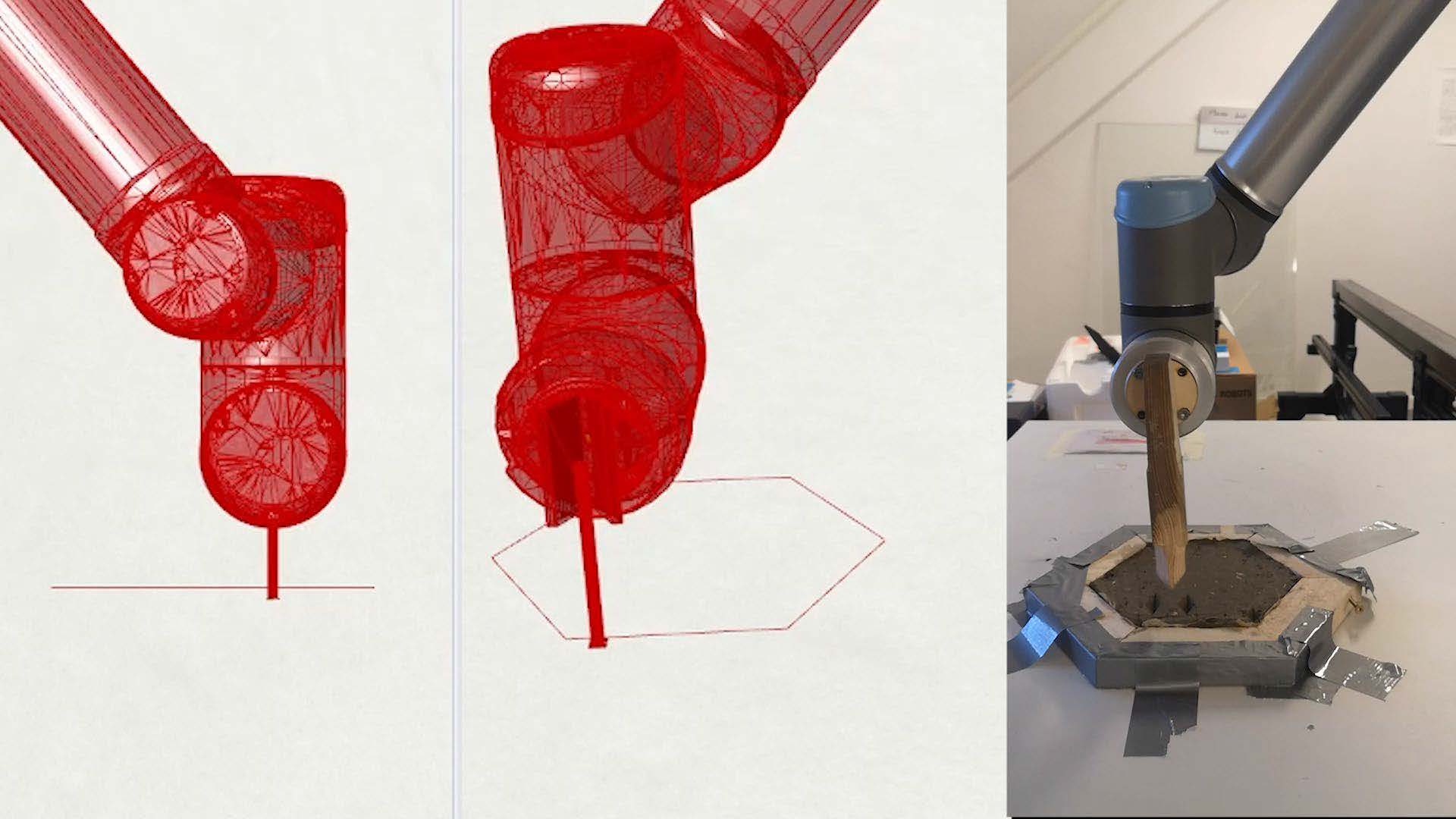
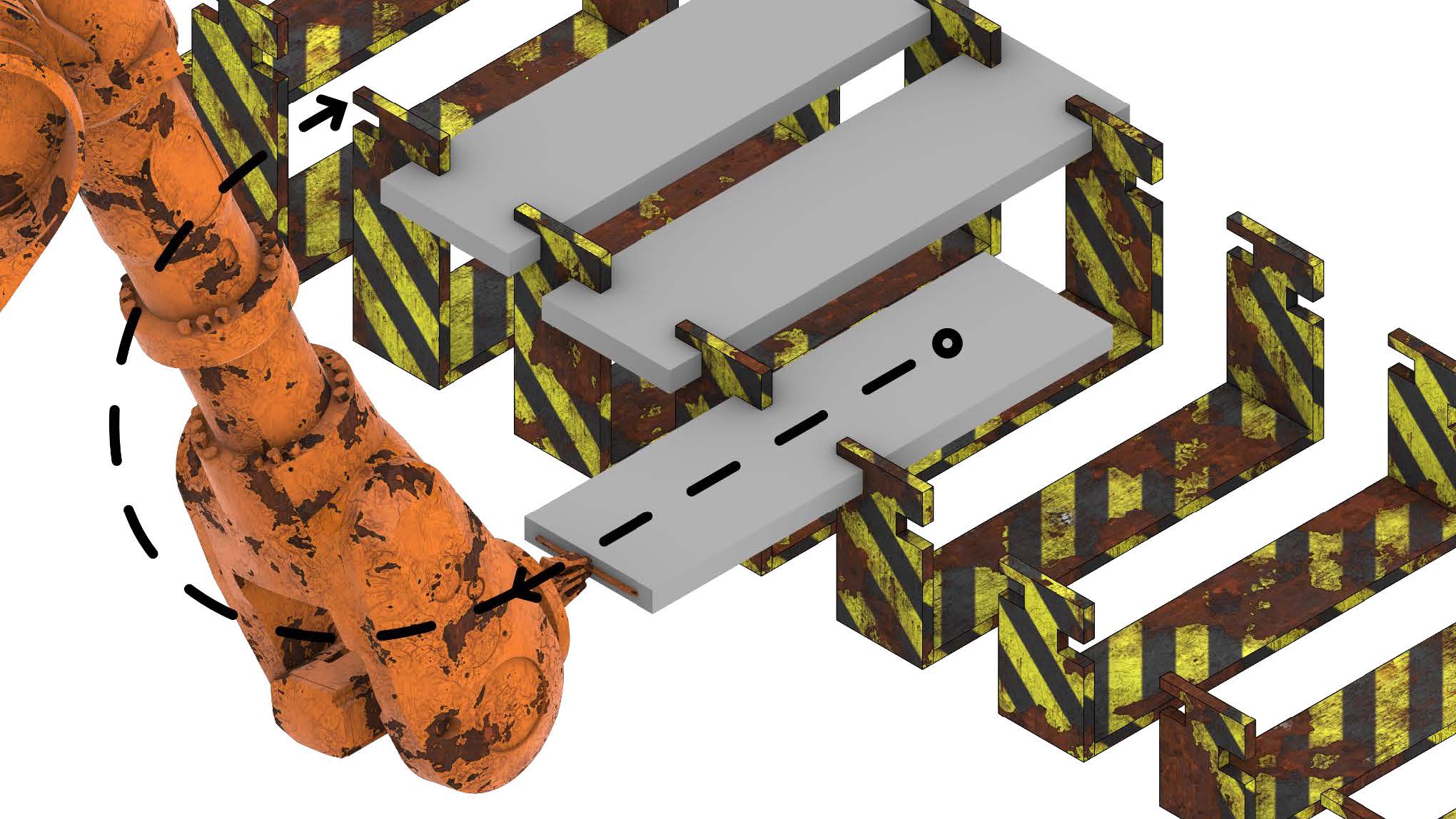
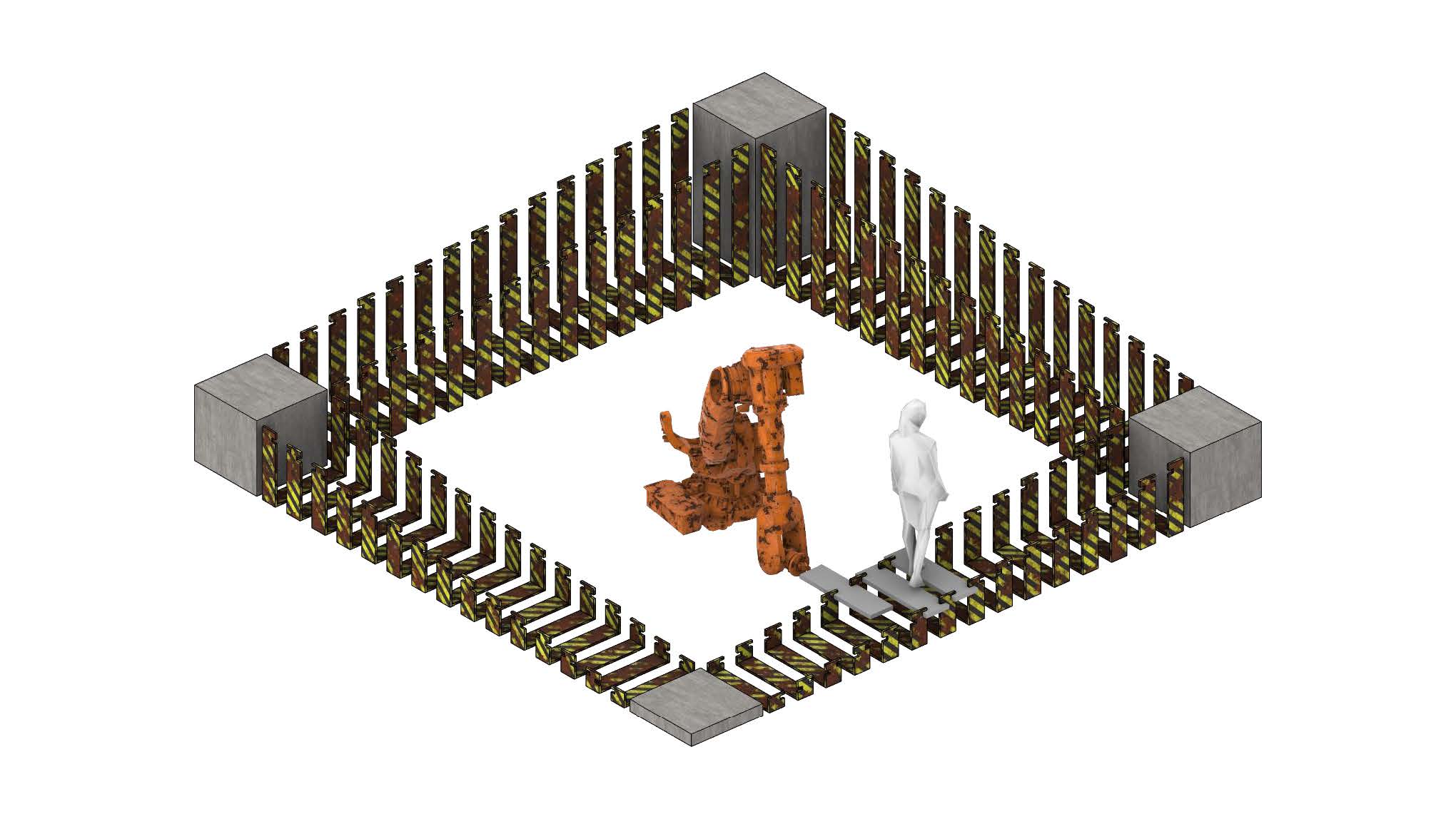
Robotic Precision Placement
Robotic precision placement refers to the ability of robotic systems to position objects, tools, or materials with extreme accuracy and repeatability. This capability is crucial in various applications, from manufacturing and construction to medical robotics and digital fabrication.
Robotic Stamping in Mud







More projects

CAAD
2019
Cliffhanger vd19
MID
2025
Thesis: Incremental Housing

MID
2026
Thesis: Digital Typha-House
CAAD
2021
Campus Cluster cad20

MID
2025
Digital Crafting dtmI 24

MID
2020
Cardboard Campus df22
CAAD
2016
Follow The White Rabbit / TRANSFORMATION

MID
2024
Friedwald Kalletal id24
CAAD
2022
Living Machine vd22
MID
2020
21st Century Skyscraper ibd20

CAAD
2016
Generative Skin
CAAD
2020
Resilient City cad19

CAAD
2020
Living Pod vd20
CAAD
2018
Space Hub vd18

MID
2024
Open Project 23
MID
2025
Co-Creative Robots df25
CAAD
2018
Resilient City cad17
CAAD
2021
Living Object vd21
CAAD
2016
Mind Expander / TRANSFORMATION

MID
2019
Floating City dtmII 19

MID
2021
Adaptive Nodes cd20

CAAD
2019
Resilient City cad18

CAAD
Research
2023
MonoCab OWL I – Cabin Design

MID
2024
Design With Robots

MID
2020