






Co-Creative Robots df25
Co-Creative Robots df25
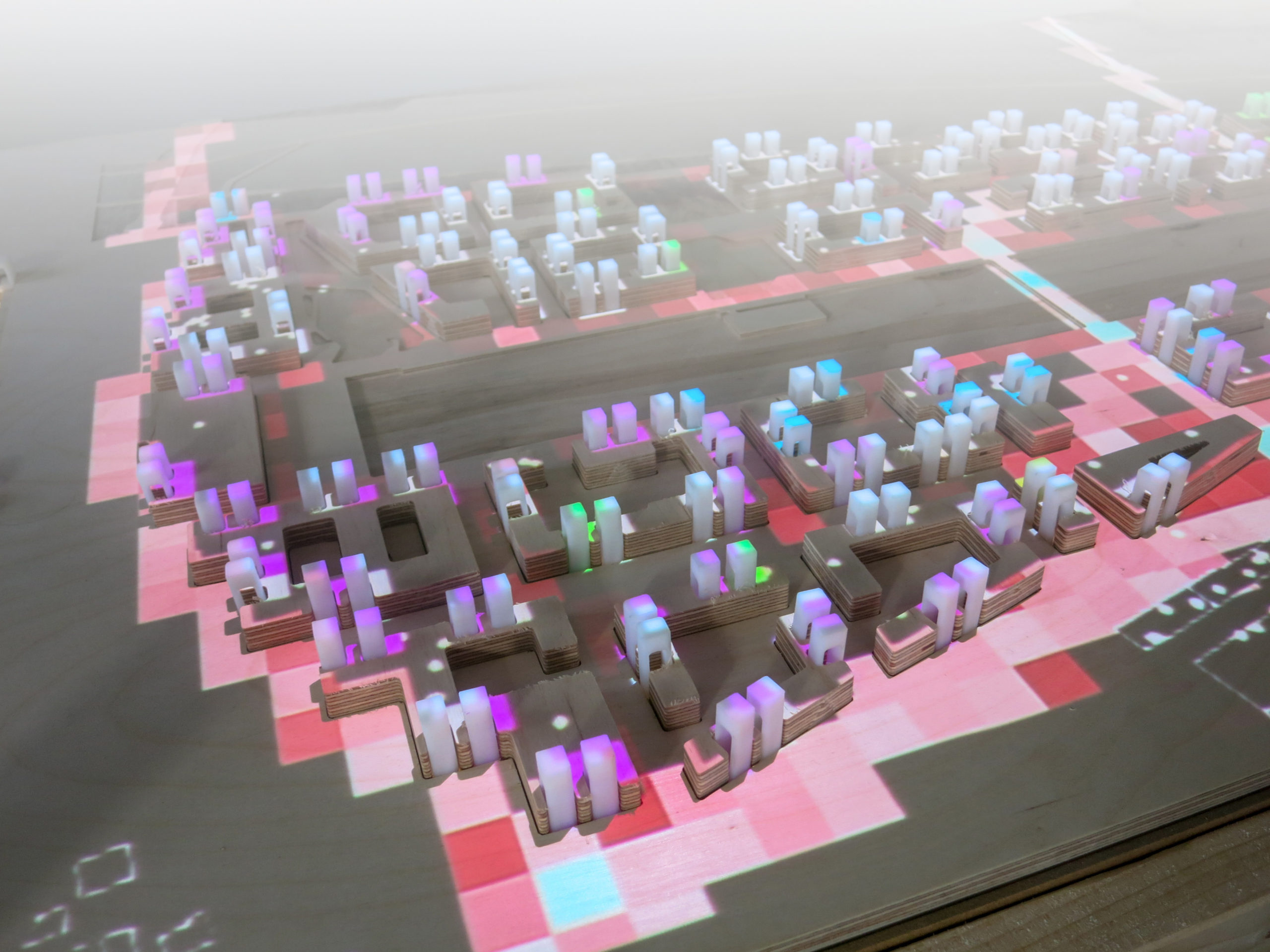
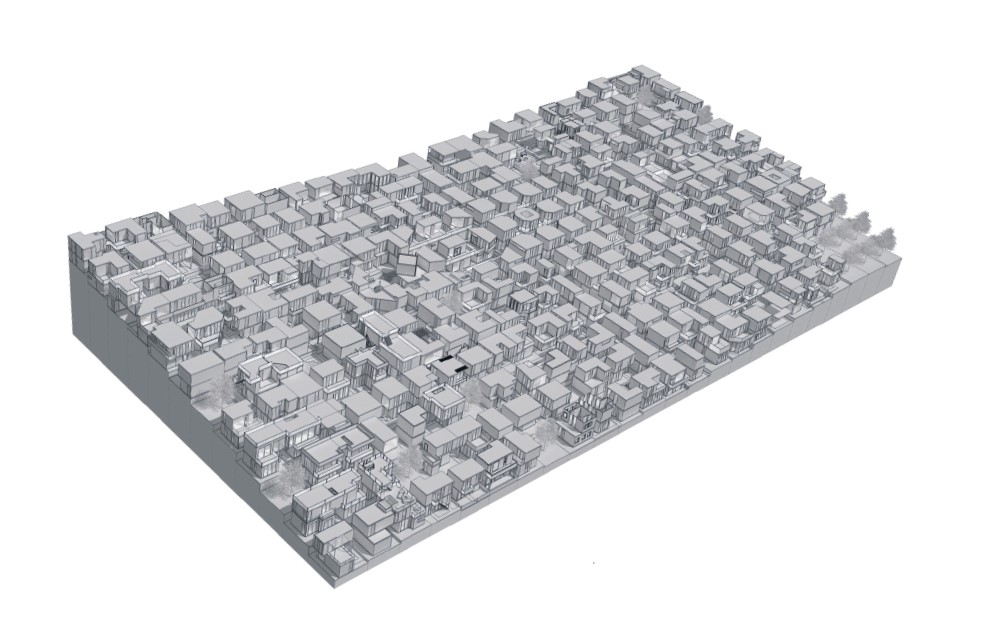
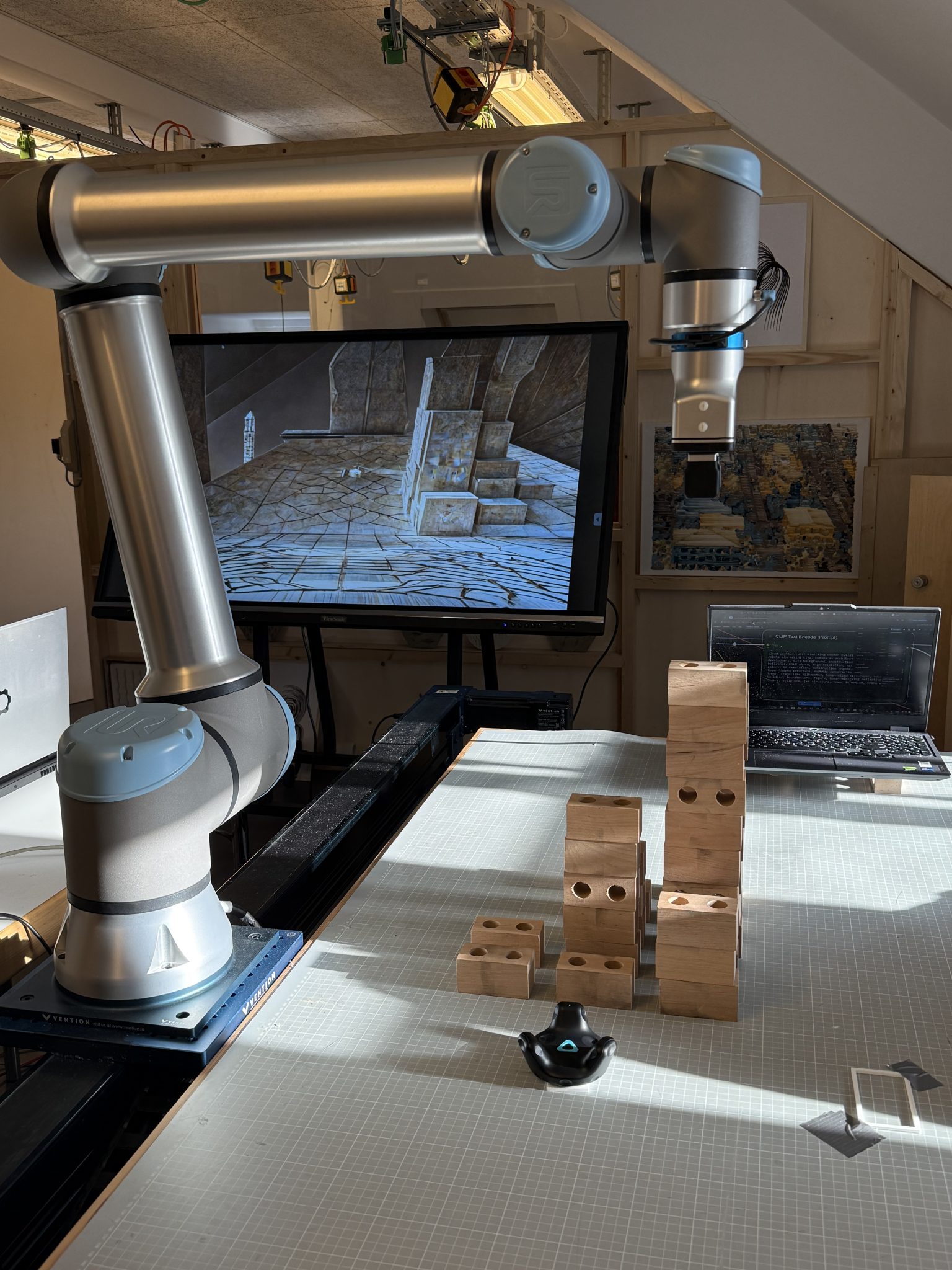
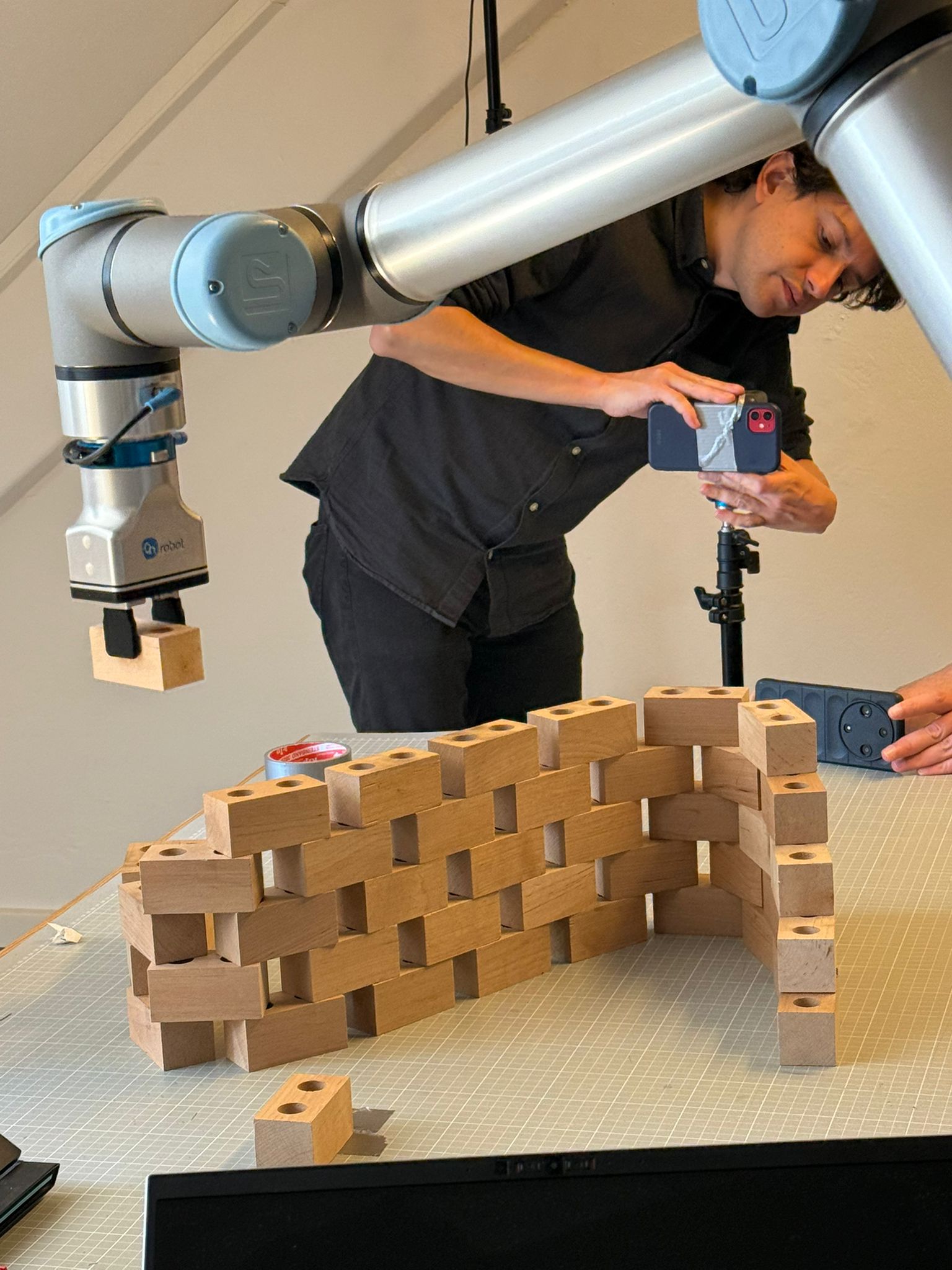
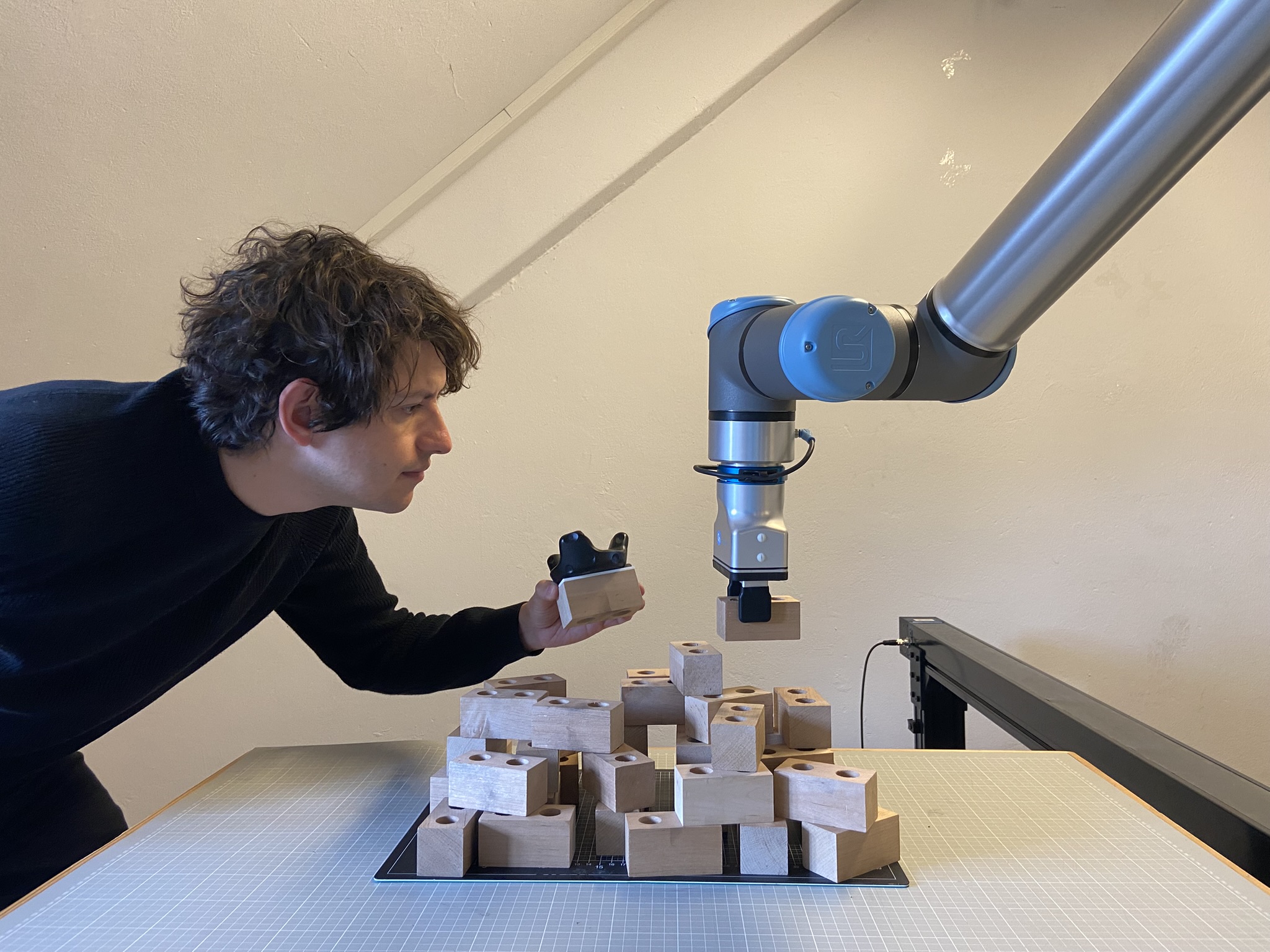
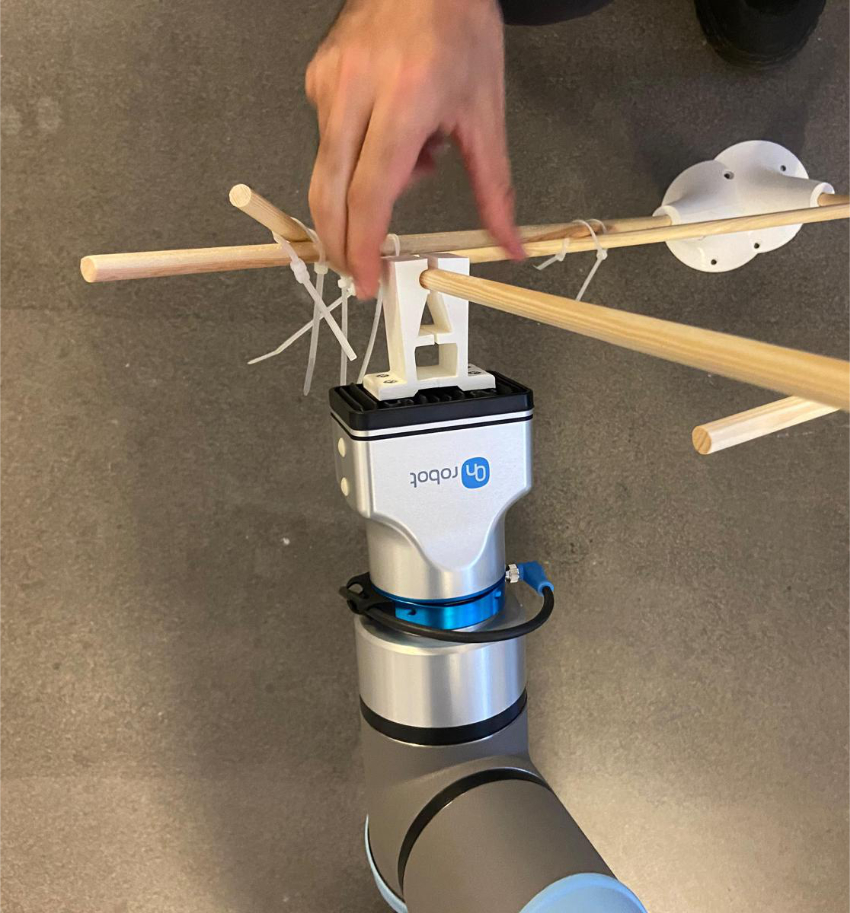
The Co-Creative Robots 2025 project explores a novel mode of human-robot collaboration in the early stages of architectural design. It centers on a turn-based assembly game in which a human and a robotic arm take turns placing rectangular bricks within a defined 3D space. The human initiates the process by physically placing a brick, and a Python-based Grasshopper script—integrated with ChatGPT—interprets the geometry and determines a valid response. The robot then places the next brick accordingly, ensuring it obeys structural rules such as support, spacing, and collision avoidance. This iterative process transforms robotic fabrication into a co-creative spatial dialogue.
The system combines geometric computation with AI to generate each robotic move, enabling hybrid creativity between designers and robots. The logic maintains a persistent memory of previous placements, checks for valid stacking positions, and applies constraints such as orientation, spacing for the gripper, and layer sequencing. A key component of the experience is a camera overlooking the evolving assembly. After each new brick is placed, an image is captured and processed through Stable Diffusion to generate a speculative visualization of what the final structure could become. This real-time feedback is projected onto a large display, creating a continuous visual conversation between the material process and its architectural potential.
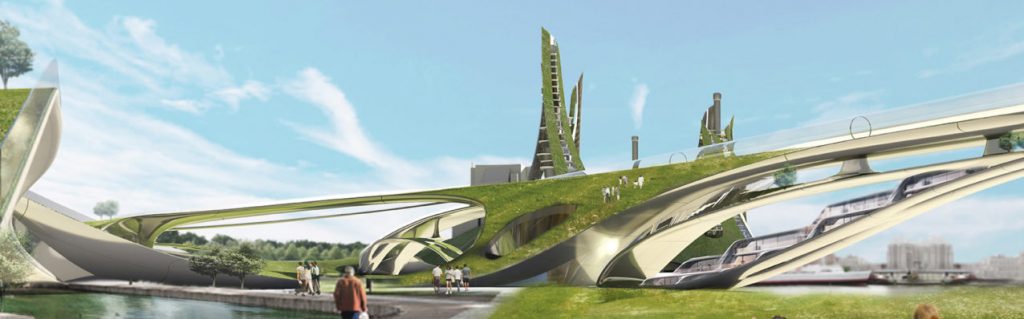
This setup positions the robot not as a passive executor but an intelligent participant in design exploration. The project encourages the human designer to reflect, anticipate, and iterate by pairing physical action with AI-generated visual projections. The speculative images produced by Stable Diffusion serve as aesthetic prompts and narrative extensions of the physical game. Co-CreativeRobots 2025 thus operates as a testbed for new modes of co-authorship between humans and machines — where building and imagining evolve together in real time.





More projects
MID
2024
Façade Reform Workshop

MID
2020
Space Mesh df20
MID
2020
21st Century Skyscraper ibd20

CAAD
2019
Resilient City cad18

MID
2020
Open Project 19

MID
2026
Thesis: Digital Typha-House

CAAD
2016
Generative Skin
CAAD
2018
Resilient City cad17

CAAD
2016
NEW BABYLON
MID
2026
Culture and Climate Related Façade Design: MID2040, SoSe25
CAAD
2020
Resilient City cad19
MID
2025
Open Project 24

MID
2023
Open Project 22
MID
2025
Thesis: Incremental Housing

CAAD
2022
Resilient City cad21
CAAD
2021
Campus Cluster cad20
CAAD
2016
Mind Expander / TRANSFORMATION

CAAD
MID
Research
2018
Digital Hut
CAAD
2018
Space Hub vd18

CAAD
MID
Research
2023
Mycelion

MID
2021
Adaptive Nodes cd20

MID
2020
Cardboard Campus df22

CAAD
2017
Shared Towers cad16
MID
2024
Collaborative Robotics df24
CAAD
2023